
Design of a Low Cost Control System for an Astronomical Observatory
Main Article Content
Keywords
Electrical design, system architecture, system and network configuration, control system design, MEADE-LX850
Abstract
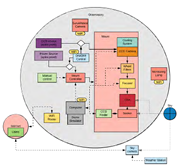
This work shows the engineering process carried out for the design of a low cost control system for an astronomical observatory. The work describes the implementation to adapt the equipment of the observatory to a Master Control System (MCS) and be able to use it remotely. The instruments and software required for the integration of the equipment as part of a robotic observatory are also described.
Downloads
References
[1] K. G. Strassmeier, L. J. Boyd, D. H. Epand, and T. Granzer, “Wolfgang-amadeus: The university of vienna twin automatic photoelectric telescope,” Astronomical Society of the Pacific, vol. 109, pp. 697–706, Jun 1997. https://doi.org/10.1086/133934
[2] A. J. Castro-Tirado, “Robotic autonomous observatories: a historical perspective,” Advances in Astronomy, vol. 2010, 2010. https://doi.org/10.1155/2010/570489
[3] A. Pickles, A. Hjelstrom, T. Boroson, B. Burleson, P. Conway, J. De Vera, M. Elphick, B. Haworth, W. Rosing, E. Saunders et al., “Lcogt network observatory operations,” in Observatory Operations: Strategies, Processes, and Systems V, vol. 9149. International Society for Optics and Photonics, 2014, p. 914912.
[4] J. N. González-Pérez, A. Hempelmann, M. Mittag, and H.-J. Hagen, “Controlling the hamburg robotic telescope: a description of the software,” in Advanced Software and Control for Astronomy II, vol. 7019. International Society for Optics and Photonics, 2008, p. 70192V.
[5] G. Bakos, Z. Csubry, K. Penev, D. Bayliss, A. Jordán, C. Afonso, J. D. Hartman, T. Henning, G. Kovács, R. W. Noyes et al., “Hatsouth: a global network of fully automated identical wide-field telescopes,” Publications of the Astronomical Society of the Pacific, vol. 125, no. 924, p. 154, 2013. https://doi.org/10.1086/669529
[6] E. L. Gomez and M. T. Fitzgerald, “Robotic telescopes in education,” Astronomical Review, vol. 13, no. 1, pp. 28–68, 2017.
[7] H. Muriel, “Astronomy in argentina,” People and Strategies in Astronomy, vol. 2, pp. 73–98, 2013. http://venngeist.org/opsa2_muriel.pdf
[8] S. Villanueva Jr, B. S. Gaudi, R. W. Pogge, J. D. Eastman, K. G. Stassun, M. Trueblood, and P. Trueblood, “The dedicated monitor of exotransits and transients (demonext): System overview and year one results from a low-cost robotic telescope for follow-up of exoplanetary transits and transients,” arXiv preprint arXiv:1709.05353, 2017. https://doi.org/10.1088/1538-3873/aa9603
[9] G. W. Henry and J. A. Eaton, Eds., Robotic telescopes : current capabilities, present developments, and future prospects for automated astronomy : proceedings of a symposium held as part of the 106th annual meeting of the Astronomical Society of the Pacific, Flagstaff, Arizona, 28-30 June 1994, ser. Astronomical Society of the Pacific Conference Series, vol. 79, 1995. http://adsabs.harvard.edu/abs/1995ASPC...79.....H
[10] F. K. Chun, R. D. Tippets, D. M. Strong, D. J. Della-Rose, D. E. Polsgrove, K. C. Gresham, J. A. Reid, C. P. Christy, M. Korbitz, J. Gray et al., “A new global array of optical telescopes: The falcon telescope network,” Publications of the Astronomical Society of the Pacific, vol. 130, no. 991, p. 095003, 2018. https://doi.org/10.1088/1538-3873/aad03f
[11] J. Schmitt, K.-P. Schröder, G. Rauw, A. Hempelmann, M. Mittag, J. González-Pérez, S. Czesla, U. Wolter, D. Jack, P. Eenens et al., “Tigre: A new robotic spectroscopy telescope at guanajuato, mexico,” Astronomische Nachrichten, vol. 335, no. 8, pp. 787–796, 2014.
[12] A. B. Smith, “The development and implementation of a remote robotic telescope system at appalachian state university’s dark sky observatory: A thesis,” Ph.D. dissertation, Appalachian State University, 2009.
[13] J. Pepper, R. W. Pogge, D. L. DePoy, J. L. Marshall, K. Z. Stanek, A. M. Stutz, S. Poindexter, R. Siverd, T. P. O’Brien, M. Trueblood, and P. Trueblood, “The kilodegree extremely little telescope (kelt): A small robotic telescope for large-area synoptic surveys,” Publications of the Astronomical Society of the Pacific, vol. 119, no. 858, p. 923, 2007. https://doi.org/10.1086/521836
[14] M. Lehner, C.-Y. Wen, J.-H. Wang, S. Marshall, M. Schwamb, Z.-W. Zhang, F. Bianco, J. Giammarco, R. Porrata, C. Alcock et al., “The taiwanese-american occultation survey: the multi-telescope robotic observatory,” Publications of
the Astronomical Society of the Pacific, vol. 121, no. 876, p. 138, 2009. https://doi.org/10.1086/597516
[15] M. Kosiarek, “First autonomous telescope at wallace observatory: impact and preliminary results,” Ph.D. dissertation, Massachusetts Institute of Technology, 2015.
[16] J. Gálvez Serna, “Diseño de un sistema de control para un observatorio astronómico robótico autónomo básico,” Tesis de Maestría, 2018. 112, 117
[17] W. Gawronski, “Control and pointing challenges of antennas and (radio) telescopes (i),” in PROCEEDINGS OF THE AMERICAN CONTROL CONFERENCE, vol. 6, 2005, p. 3758.
[18] C. J. Mottram, I. A. Steele, and L. Morales, “Design of low cost and reliable instrumentation for robotic telescopes,” in Ground-based Instrumentation for Astronomy, vol. 5492. International Society for Optics and Photonics, 2004, pp. 677–689.
[19] ASCOM, “ASCOM - Standards for Astronomy,” 2014. http://ascom-standards.org/index.htm
[20] E. Downey, “Indi: Instrument-neutral distributed interface,” 2007.
[21] C. Pennypacker, M. Boer, R. Denny, F. Hessman, J. Aymon, N. Duric, S. Gordon, D. Barnaby, G. Spear, and V. Hoette, “Rtml–a standard for use of remote telescopes-enabling ubiquitous use of remote telescopes,” Astronomy & Astrophysics, vol. 395, no. 2, pp. 727–731, 2002. https://doi.org/10.1051/0004-6361:20021318
[22] A. Klotz, “Protocols for robotic telescope networks,” Advances in Astronomy, vol. 2010, 2010. https://doi.org/10.1155/2010/496765
[23] K. A. Hallberg, “Reducción de datos astronómicos basada en procesamiento de imágenes para la robotización de telescopios,” Ph.D. dissertation, UNIVERSIDAD DE BUENOS AIRES, 2013.
[24] R. M. Genet, D. S. Hayes, D. Epand, L. Boyd, and D. Keller, “Robotic observatories. a handbook of remote-access personal-computer astronomy.” Robotic observatories. A handbook of remote-access personal-computer astronomy., by Genet, RM; Hayes, DS; Epand, DH; Boyd, LJ; Keller, DF. AutoScope Corp., Mesa, AZ (USA), 1989, 14-292 p. 1989.
[25] P. Barbosa and J. Gregorio, Elementos de astronomía de posición, universidad ed. Bogotá: Universidad Nacional de Colombia, 2009.
[26] L. Hardy, T. Butterley, V. Dhillon, S. Littlefair, and R. Wilson, “pt5m–a 0.5 m robotic telescope on la palma,” Monthly Notices of the Royal Astronomical Society, vol. 454, no. 4, pp. 4316–4325, 2015.
[27] S. B. Cenko, D. B. Fox, D.-S. Moon, F. A. Harrison, S. Kulkarni, J. R. Henning, C. D. Guzman, M. Bonati, R. M. Smith, R. P. Thicksten et al., “The automated palomar 60 inch telescope,” Publications of the Astronomical Society of the Pacific,
vol. 118, no. 848, p. 1396, 2006. https://doi.org/10.1086/508366
[28] J. Colomé, I. Ribas, X. Francisco, K. Casteels, D. Fernández, J. Isern, X. Palau, and J. Torra, “The oadm robotic observatory,” Advances in Astronomy, vol. 2010, 2010. https://doi.org/10.1155/2010/183016
[29] A. Yanes-Díaz, S. Rueda-Teruel, J. Antón, F. Rueda-Teruel, M. Moles, A. Cenarro, A. Marín-Franch, A. Ederoclite, N. Gruel, J. Varela et al., “Goals and strategies in the global control design of the oaj robotic observatory,” in Observatory Operations: Strategies, Processes, and Systems IV, vol. 8448. International Society for Optics and Photonics, 2012, p. 84481B.
[30] M. Im, C. Choi, and K. Kim, “Lee sang gak telescope (lsgt): a remotely operated robotic telescope for education and research at seoul national university,” arXiv preprint arXiv:1510.03161, 2015. https://doi.org/10.5303/JKAS.2015.48.4.207
[31] W. Vestrand, J. Theiler, and P. Wozniak, “Unsolved problems in observational astronomy. ii. focus on rapid response – mining the sky with “thinking” telescopes,” Astronomische Nachrichten: Astronomical Notes, vol. 325, no. 6-8, pp. 477–482, 2004. https://doi.org/10.1002/asna.200410268
[32] N. Blagorodnova, J. D. Neill, R. Walters, S. R. Kulkarni, C. Fremling, S. Ben-Ami, R. G. Dekany, J. R. Fucik, N. Konidaris, R. Nash et al., “The sed machine: a robotic spectrograph for fast transient classification,” Publications of the Astronomical Society of the Pacific, vol. 130, no. 985, p. 035003, 2018. https://doi.org/10.1088/1538-3873/aaa53f
[33] J. Ebr, T. Bulik, L. Font, M. Gaug, P. Janecek, J. Jurysek, D. Mandat, S. Stefanik, L. Valore, and G. Vasileiadis, “Atmospheric calibration of the cherenkov telescope array,” arXiv preprint arXiv:1709.04273, 2017.
[34] M. Solar, P. Michelon, J. Avarias, and M. Garces, “A scheduling model for astronomy,” Astronomy and Computing, vol. 15, pp. 90–104, 2016. https://doi.org/10.1016/j.ascom.2016.02.005
[35] Q. Liu, P. Wei, Z.-H. Shang, B. Ma, and Y. Hu, “Research on scheduling of robotic transient survey for antarctic survey telescopes (ast3),” Research in Astronomy and Astrophysics, vol. 18, no. 1, p. 005, 2018. https://doi.org/10.1088/1674\T1\textendash4527/18/1/5
[36] A. R. Chishti, S. Bukhari, H. S. Khaliq, M. H. Khan, and S. Z. H. Bukhari, “Radio telescope antenna azimuth position control system design and analysis in matlab/simulink using pid&lqr controller,” The Islamia University of Bahawalpur, Pakistan, 2014.
[37] Y. Tsapras, R. Street, K. Horne, C. Snodgrass, M. Dominik, A. Allan, I. Steele, D. Bramich, E. Saunders, N. Rattenbury et al., “Robonet-ii: Follow-up observations of microlensing events with a robotic network of telescopes,” Astronomische Nachrichten: Astronomical Notes, vol. 330, no. 1, pp. 4–11, 2009. https://doi.org/10.1002/asna.200811130
[38] A. B. Smith, D. B. Caton, and R. L. Hawkins, “Implementation and operation of a robotic telescope on skynet,” Publications of the Astronomical Society of the Pacific, vol. 128, no. 963, p. 055002, 2016. http://dx.doi.org/10.1088/1538-3873/128/963/055002
[39] A. Castro-Tirado, F. S. Moreno, C. P. del Pulgar, D. Azócar, G. Beskin, J. Cabello, R. Cedazo, L. Cuesta, R. Cunniffe, E. González et al., “The global robotic telescopes intelligent array for e-science (gloria),” Revista Mexicana de Astronomía
y Astrofísica, vol. 45, pp. 104–109, 2014.
Article Sidebar
Article Details
Julian Galvez-Serna, Universidad de Antioquia
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgement of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgement of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).