
Three-Dimensional Geometric Model for Rock Masses from Photographs and the Octave Program: Cantera Santa Rita, Medellín, Colombia
Main Article Content
Keywords
Computer vision, epipolar geometry, discontinuity orientation, rock mass
Abstract
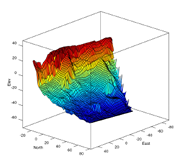
The present article exposes the procedure to achieve the three-dimensional geometric model of a rock mass from a pair of photographic shots made with a current camera, use of free/open software such as Octave and other free libraries, construction of equipment and simple tools and the appropriation of important knowledge in artificial vision. It is described taking as an example the three-dimensional model of a blast cut of the rock mass of the Santa Rita Quarry, located southwest of the city of Medellín (Colombia). Finally, it is shown by a validation, based on field measurements, that the procedure described here is promising so that it can be established as a tool for the geometric characterization of discontinuities of rock mass.
Downloads
References
[2] C. Wöhler, 3-D computer vision: Efficient methods and applications, 1st ed. Berlin: Springer, 2009.
[3] P. Wolf and B. Dewitt, Elements of photogrammetry with applications in GIS, 3rd ed. Boston: McGraw-Hill, 2000.
[4] J. Harrison, “Improved analysis of rock mass geometry using mathematical and photogrammetric methods,” Ph.D. Thesis, Imperial College, London, 1993.
[5] J. Coe, “Close-range photogrammetric geological mapping and structural analysis,” MSc. Thesis, Colorado School of Mines, USA, 1995.
[6] J. Franklin and N. Maerz, “Digital photoanalysis of rock jointing, in situ testing and field behavior,” in Canadian Geotechnical Conference, 1986, pp. 11–20.
[7] N. Maerz, J. Franklin, L. Rothenburg, and D. Coursen, “Measurement of rock fragmentation by digital photoanalysis,” in Proceedings of the 6th International Congress on Rock Mechanics, vol. 1, Montreal, 1987, pp. 687–692.
[8] A. Gaich, M. Pötsch, and W. Schubert, “Rock mass characterization using scaled 3D images,” in Proceedings of the ISRM Sponsored International Symposium on Rock Mechanics: Rock Characterization, Modelling and Engineering Design Methods, SINOROCK2009, J. Hudson, L. Tham, X.-T. Feng, and A. Kwong, Eds., vol. 1. Hong Kong: The University of Hong Kong, May 2009, pp. 101–105.
[9] F. Lemy and J. Hadjigeorgiou, “A digital face mapping case study in an underground hard rock mine,” Canadian Geotechnical Journal, vol. 41, pp. 1011–1025, 2004.
[10] J. Kemeny and R. Post, “Estimating three-dimensional rock discontinuity orientation from digital images of fracture traces,” Computers & Geosciences, vol. 29, no. 1, pp. 65 – 77, 2003. [Online]. Available:
https://doi.org/10.1016/S0098-3004(02)00106-1
[11] S. Slob, R. Hack, B. van Knapen, and J. Kemeny, “Automated identification and characterization of discontinuity sets in outcropping rock masses using 3D terrestrial laser scan survey techniques,” in Proceedings of the ISRM Regional Symposium: 53th Geomechanics Colloquy, EUROCK 2004, W. Schubert, Ed., Austrian Society for Geomechanics. Salzburg, Austria: VGE, October 2004, pp. 439–443.
[12] T. Reid and J. Harrison, “A semi-automated methodology for discontinuity trace detection in digital images of rock mass exposures,” International Journal of Rock Mechanics and Mining Sciences, vol. 37, no. 7, pp. 1073
– 1089, 2000. [Online]. Available: https://doi.org/10.1016/S1365-1609(00)00041-1
[13] D. Ballard and C. Brown, Computer vision, 1st ed. Englewood Cliffs, NJ: Prentice Hall, 1982.
[14] O. Faugeras, Three dimensional computer vision: A geometric viewpoint, 1st ed. Massachusetts: MIT Press, 1993.
[15] E. Trucco and A. Verri, Introductory techniques for 3-D computer vision, 1st ed. Upper Saddle River, NJ: Prentice Hall, 1998.
[16] R. Hartley and A. Zisserman, Multiple view geometry in computer vision, 2nd ed. Cambridge: Cambridge University Press, 2003.
[17] R. Szeliski, Computer vision: Algorithms and applications, 1st ed., ser. Texts in Compuer Science, D. Greis and F. Schneider, Eds. London: Springer, 2011.
[18] R. Alzate-Agudelo, “Estudio de exploración geotécnica para la ampliación del lote de explotación de materieales pétreos en el costado occidental de la cantera Santa Rita,” BSc. Thesis, Escuela de Ingeniería Civil, Universidad Nacional de Colombia, Medellín, Colombia, Feb 2007.
[19] R. Willson, “Modeling and calibration of automated zoom lenses,” Ph.D. Thesis, The Robotics Institute Carnegie Mellon University, Pittsburgh, PE, Jan 1994, cMU-RI-TR-94-03.
[20] R. Willson, “Modeling and calibration of automated zoom lenses,” 3M Engineering Systems and Technology, Technical Report, 1994.
[21] J.-Y. Bouguet, “Camera calibration toolbox for Matlab,” http://www.vision.caltech.edu/bouguetj/calib_doc/index.html, 2013.
[22] Z. Zhang, “Flexible camera calibration by viewing a plana from unknown orientations,” in Proceedings of the 7st IEEE International Conference on Computer Vision, vol. 1. Kerkyra: Institute of Electrical and Electronics
Engineers, Sep 1999, pp. 666–673.
[23] P. Kovesi, “MATLAB and Octave functions for computer vision and image processing,” http://www.csse.uwa.edu.au/~pk/research/matlabfns/, Nov 2010, centre for Exploration Targeting, School of Earth and Environment, The University of Western Australia.
[24] A. Zisserman, “Vgg multiview compute library,” http://www.robots.ox.ac.uk/~vgg/hzbook/code/, Nov 2012, robotics Research Group, Department of Engineering Science, University of Oxford.
[25] C. Harris and M. Stephens, “A combined corner and edge detector,” in Proceedings of the 4th Alvey Vision Conference (AVC88), vol. 1, University of Manchester. Manchester: University of Sheffield Printing Unit, Aug 1988, pp. 147–151, session 6.
[26] M. Fischler and R. Bolles, “Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography,” Communications of the Association for Computing Machinery,
pp. 381–395, Jun 1981. [Online]. Available: https://www.sri.com/sites/default/files/publications/ransac-publication.pdf
Article Sidebar
Article Details
Ludger O. Suarez-Burgos, Universidad Nacional de Colombia
Profesor Asistente, Departamento de Ingeniería Civil, Facultad de Minas
Alvaro J. Castro-Caicedo, Universidad Nacional de Colombia
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgement of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgement of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).