
Modelo geométrico tridimensional para macizos rocosos a partir de fotografías y el programa Octave: Cantera Santa Rita, Medellín, Colombia
Main Article Content
Keywords
Visión artificial, geometría epipolar, orientación de discontinuidades, macizos rocosos
Resumen
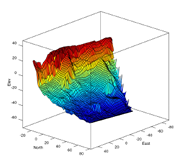
El presente artículo expone el procedimiento para lograr el modelo geométrico tridimensional de un macizo rocoso a partir de un par de tomas fotográficas hechas con una cámara corriente, uso de software libre/abierto como Octave y otras librerías libres, construcción de equipos y herramientas sencillos y la apropiación de conocimientos importantes en visión artificial. Se describe tomando como ejemplo el modelo tridimensional de un corte de voladura del macizo rocoso de la Cantera Santa Rita, localizada al sudoeste de la ciudad de Medellín (Colombia). Finalmente, se muestra mediante una validación, a partir de medidas de campo in situ, que el procedimiento descrito aquí es promisorio para que pueda instaurarse como una herramienta para la caracterización geométrica de discontinuidades de los macizos rocosos.
Descargas
Referencias
[2] C. Wöhler, 3-D computer vision: Efficient methods and applications, 1st ed. Berlin: Springer, 2009.
[3] P. Wolf and B. Dewitt, Elements of photogrammetry with applications in GIS, 3rd ed. Boston: McGraw-Hill, 2000.
[4] J. Harrison, “Improved analysis of rock mass geometry using mathematical and photogrammetric methods,” Ph.D. Thesis, Imperial College, London, 1993.
[5] J. Coe, “Close-range photogrammetric geological mapping and structural analysis,” MSc. Thesis, Colorado School of Mines, USA, 1995.
[6] J. Franklin and N. Maerz, “Digital photoanalysis of rock jointing, in situ testing and field behavior,” in Canadian Geotechnical Conference, 1986, pp. 11–20.
[7] N. Maerz, J. Franklin, L. Rothenburg, and D. Coursen, “Measurement of rock fragmentation by digital photoanalysis,” in Proceedings of the 6th International Congress on Rock Mechanics, vol. 1, Montreal, 1987, pp. 687–692.
[8] A. Gaich, M. Pötsch, and W. Schubert, “Rock mass characterization using scaled 3D images,” in Proceedings of the ISRM Sponsored International Symposium on Rock Mechanics: Rock Characterization, Modelling and Engineering Design Methods, SINOROCK2009, J. Hudson, L. Tham, X.-T. Feng, and A. Kwong, Eds., vol. 1. Hong Kong: The University of Hong Kong, May 2009, pp. 101–105.
[9] F. Lemy and J. Hadjigeorgiou, “A digital face mapping case study in an underground hard rock mine,” Canadian Geotechnical Journal, vol. 41, pp. 1011–1025, 2004.
[10] J. Kemeny and R. Post, “Estimating three-dimensional rock discontinuity orientation from digital images of fracture traces,” Computers & Geosciences, vol. 29, no. 1, pp. 65 – 77, 2003. [Online]. Available:
https://doi.org/10.1016/S0098-3004(02)00106-1
[11] S. Slob, R. Hack, B. van Knapen, and J. Kemeny, “Automated identification and characterization of discontinuity sets in outcropping rock masses using 3D terrestrial laser scan survey techniques,” in Proceedings of the ISRM Regional Symposium: 53th Geomechanics Colloquy, EUROCK 2004, W. Schubert, Ed., Austrian Society for Geomechanics. Salzburg, Austria: VGE, October 2004, pp. 439–443.
[12] T. Reid and J. Harrison, “A semi-automated methodology for discontinuity trace detection in digital images of rock mass exposures,” International Journal of Rock Mechanics and Mining Sciences, vol. 37, no. 7, pp. 1073
– 1089, 2000. [Online]. Available: https://doi.org/10.1016/S1365-1609(00)00041-1
[13] D. Ballard and C. Brown, Computer vision, 1st ed. Englewood Cliffs, NJ: Prentice Hall, 1982.
[14] O. Faugeras, Three dimensional computer vision: A geometric viewpoint, 1st ed. Massachusetts: MIT Press, 1993.
[15] E. Trucco and A. Verri, Introductory techniques for 3-D computer vision, 1st ed. Upper Saddle River, NJ: Prentice Hall, 1998.
[16] R. Hartley and A. Zisserman, Multiple view geometry in computer vision, 2nd ed. Cambridge: Cambridge University Press, 2003.
[17] R. Szeliski, Computer vision: Algorithms and applications, 1st ed., ser. Texts in Compuer Science, D. Greis and F. Schneider, Eds. London: Springer, 2011.
[18] R. Alzate-Agudelo, “Estudio de exploración geotécnica para la ampliación del lote de explotación de materieales pétreos en el costado occidental de la cantera Santa Rita,” BSc. Thesis, Escuela de Ingeniería Civil, Universidad Nacional de Colombia, Medellín, Colombia, Feb 2007.
[19] R. Willson, “Modeling and calibration of automated zoom lenses,” Ph.D. Thesis, The Robotics Institute Carnegie Mellon University, Pittsburgh, PE, Jan 1994, cMU-RI-TR-94-03.
[20] R. Willson, “Modeling and calibration of automated zoom lenses,” 3M Engineering Systems and Technology, Technical Report, 1994.
[21] J.-Y. Bouguet, “Camera calibration toolbox for Matlab,” http://www.vision.caltech.edu/bouguetj/calib_doc/index.html, 2013.
[22] Z. Zhang, “Flexible camera calibration by viewing a plana from unknown orientations,” in Proceedings of the 7st IEEE International Conference on Computer Vision, vol. 1. Kerkyra: Institute of Electrical and Electronics
Engineers, Sep 1999, pp. 666–673.
[23] P. Kovesi, “MATLAB and Octave functions for computer vision and image processing,” http://www.csse.uwa.edu.au/~pk/research/matlabfns/, Nov 2010, centre for Exploration Targeting, School of Earth and Environment, The University of Western Australia.
[24] A. Zisserman, “Vgg multiview compute library,” http://www.robots.ox.ac.uk/~vgg/hzbook/code/, Nov 2012, robotics Research Group, Department of Engineering Science, University of Oxford.
[25] C. Harris and M. Stephens, “A combined corner and edge detector,” in Proceedings of the 4th Alvey Vision Conference (AVC88), vol. 1, University of Manchester. Manchester: University of Sheffield Printing Unit, Aug 1988, pp. 147–151, session 6.
[26] M. Fischler and R. Bolles, “Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography,” Communications of the Association for Computing Machinery,
pp. 381–395, Jun 1981. [Online]. Available: https://www.sri.com/sites/default/files/publications/ransac-publication.pdf
Article Sidebar
Article Details
Ludger O. Suarez-Burgos, Universidad Nacional de Colombia
Profesor Asistente, Departamento de Ingeniería Civil, Facultad de Minas
Alvaro J. Castro-Caicedo, Universidad Nacional de Colombia
Los autores que publican en esta revista están de acuerdo con los siguientes términos:
- Los autores conservan los derechos de autor y garantizan a la revista el derecho de ser la primera publicación del trabajo al igual que licenciado bajo una Creative Commons Attribution License que permite a otros compartir el trabajo con un reconocimiento de la autoría del trabajo y la publicación inicial en esta revista.
- Los autores pueden establecer por separado acuerdos adicionales para la distribución no exclusiva de la versión de la obra publicada en la revista (por ejemplo, situarlo en un repositorio institucional o publicarlo en un libro), con un reconocimiento de su publicación inicial en esta revista.
- Se permite y se anima a los autores a difundir sus trabajos electrónicamente (por ejemplo, en repositorios institucionales o en su propio sitio web) antes y durante el proceso de envío, ya que puede dar lugar a intercambios productivos, así como a una citación más temprana y mayor de los trabajos publicados (Véase The Effect of Open Access) (en inglés).